June 2026
MoTuWeThFrSaSu
最近のダイアリー2026-06-26-網頁搭建先前也嘗試過搭個人網頁,只不過受限於審美經驗和開發方面的技術,做出來總覺得千篇一律,不能展現「個人」…
Differential Geometry
Textbook: Visual Differential Geometry and Forms: A Mathematical Drama in Five Acts by Tristan Needham
1-Forms
- Basic definitions: A linear, real-valued function of a single vector input, . The addition and (scalar) multiplication of 1-forms can be naturally defined that the set of all 1-forms constitute a vector space, the dual to . Then (contraction, see below).
- Visualisation: A ground plane defined by and a stack of parallel planes defined by . By adjusting the spacing of planes (to be ) we can make .
- Gradient 1-form: Recall that in a topographic map, the steepness is inversely proportional to the (smallest) distance between neighbouring contours, (reaches equal iff ). Let to be a (1-form) field that is an 1-form defined by in the immediate vicinity of .
- Visualisation: A ground plane defined by and a stack of parallel planes defined by . By adjusting the spacing of planes (to be ) we can make .
- Basis 1-forms: Consider a basis for and the dual basis for , in which (An equivalent definition being ). Actually any 1-form satisfies .
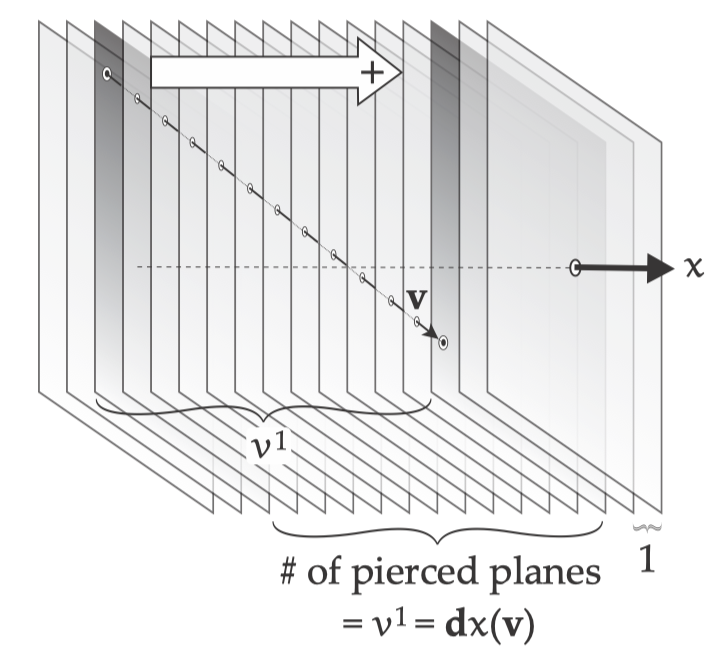
- The gradient as a 1-form: (=exterior derivative).
- where is an operator to extract the -th coordinate of . Note that formally has a same effect but act on a direction and means the change rate of on direction . We call the Cartesian basis of 1-forms dual to .
- Substitue in, .
- Geometric meaning: Consider a manifold characterised by . Apply the definition of then .
- where is an operator to extract the -th coordinate of . Note that formally has a same effect but act on a direction and means the change rate of on direction . We call the Cartesian basis of 1-forms dual to .
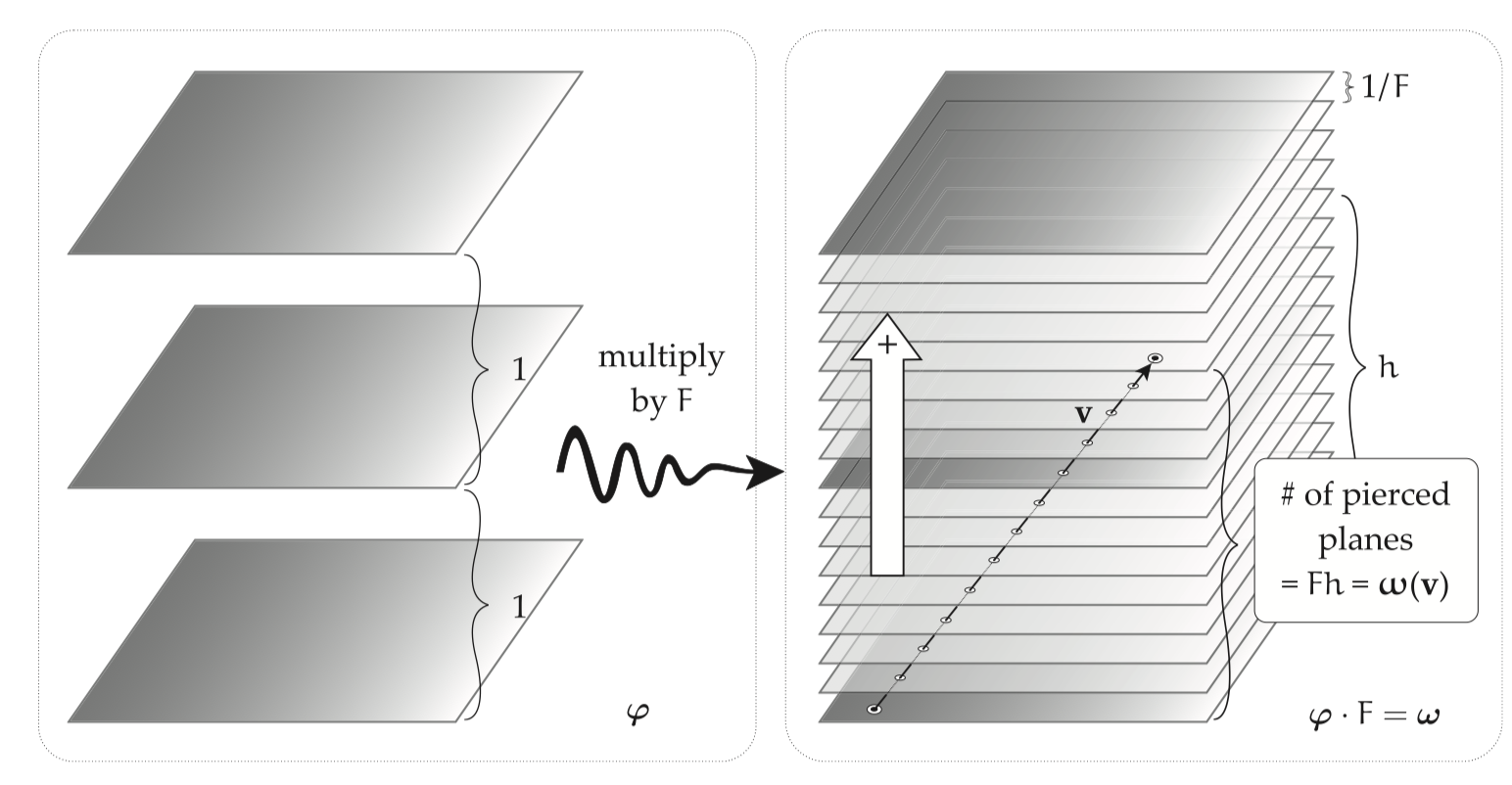
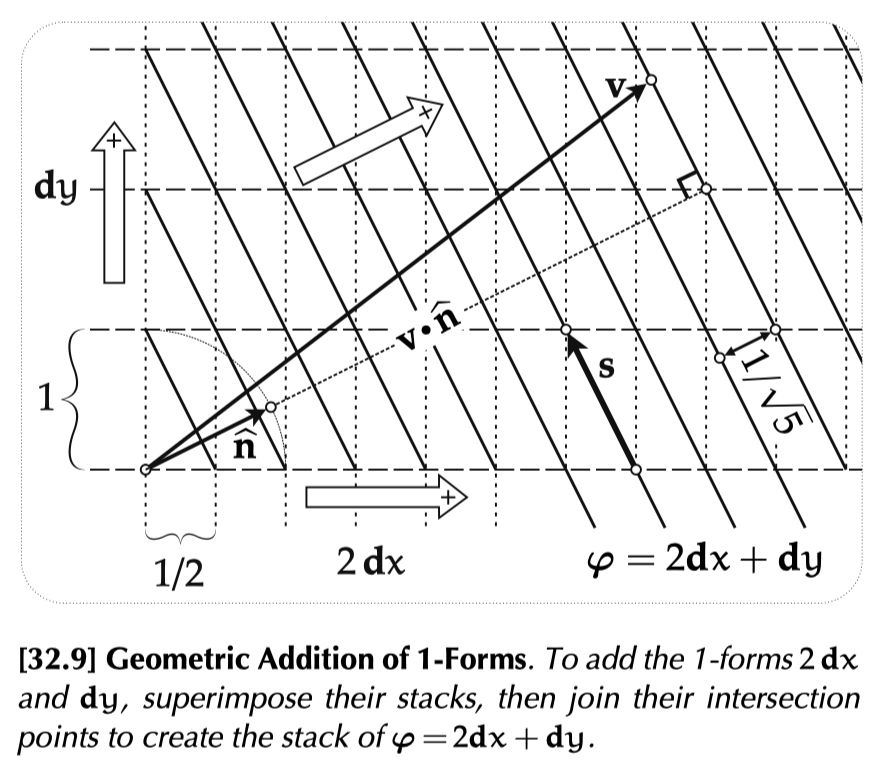
- Geometric intuition of 1-forms: Multiply by <-> compress the stack by ; Simple calculations shows that the addition( for example) of 1-forms is itself a 1-form corresponding to a new stack constructed like the figure shows.
Tensors
- Definitions: A tensor of valence at is a multilinear, real-valued function of 1-forms and vectors. Its value at only depends on the value of 1-forms and vectors at . .
- Operation: For tensors with a same valence, addition can be defined naturally; The tensor product is defined as for tensors(1-forms). Then simply for tensors of general valences.
- Components: , then , or . Directly we see that forms a basis for tensors of valance . Similarly consider and as a basis for s. Generally we may decompose s using the basis .
- Changing val:
- Contraction: , independent of the specific components of (trace of a matrix). Now suppose a general case of . When summing over an upper index(contravariant) of and a lower index(covariant) of (i.e. ), we get another tensor (1) whose valance has each index reduced by 1 compared to that of , (2) which is independent of the choice of basis.
- Metric tensor: Consider a metric tensor of valence and a map from vector to 1-form that . Calculation shows that where . Let, e.g. then . The process in called index lowering. Correspondingly we can take of valence to define to do index raising.
2-Forms
- Basic definitions: A 2-form is an antisymmetric tensor of valence , that is . A p-form is a completely antisymmetric tensor of valence , meaning that swapping any two of the inputs reverses the sign.
- . Obviously is a 2-form.
- Wedge product: We can split into the sum of a symmetric tensor and an antisymmetric tensor and define the latter to be the wedge product, i.e. . Besides the inputs, we have the antisymmetry of the wedge product itself .
- . In a general case, .
- Basis: constitutes a basis for the 2-forms. for and for .
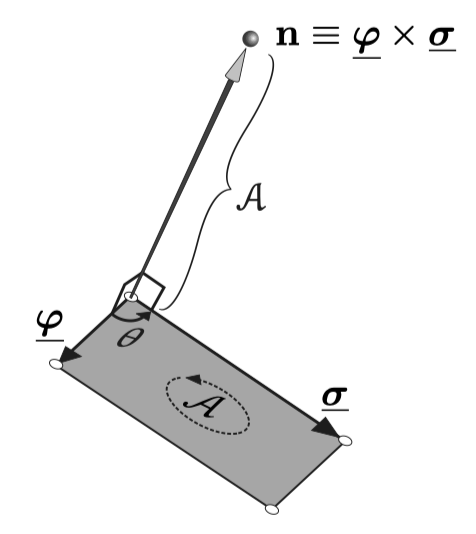
- Flux: Let . Now imagine a uniform flow of fluid with velocity and define . The flux is positive iff the direction of P and is on the same side. By simple calculation we find that .
- Vector and wedge products: Let where . Then where , or . This holds in and only in where .
- The volume of a parallelepiped with edges : Volume=flux=.
- The volume of a parallelepiped with edges : Volume=flux=.
- The Faraday and Maxwell electromagnetic 2-forms: Consider electric field and magnetic field . The corresponding 2-forms and 1-forms: E = E_{x}(dy \wedge dz) + E_{y}(dz \wedge dx) + E_{z}(dx \wedge dy),\quad \varepsilon=E_{x}dx+E_{y}dy+E_{z}dz, $$$$B = B_{x}(dy \wedge dz) + B_{y}(dz \wedge dx) + B_{z}(dx \wedge dy),\quad \beta=B_{x}dx+B_{y}dy+B_{z}dz. Now define Faraday 2-form , Maxwell 2-form , both in dimensions. Actually here means Hodge dual.
3-Forms
- The wedge product of a 2-form and 1-form: . Note that . Generally if is a -form and is a -form, then .
- The volume 3-form: Easy to verify where .
- The wedge product of three(and more) 1-forms is associative: We can write without ambiguity . Geometrically thinking, we can also define and . This definition can be generalised to the wedge product of 1-forms.
- Abstract definition of wedge product: (1) Bilinearity (2) associativity and (3) graded antisymmetry are enough to determine the operation.
- Explicit formula: .
- Basis: forms a basis for -forms.
Differentiation
- The exterior derivative: Concentrating on one point , a 0-form is a scalar. Then for different s these scalars constitutes a function(scalar field) . The exterior derivative increases the degree of the form by one to allow for the input of an additional vector(direction). Similarly we can take an 1-form field and vector field to define , where the commutator (we subtract this term to ensure the independence of the variations of the vector fields).
- Simplification of : Choose the vector fields to be constant and basis to be . Then .
- -forms: .
- The Leibniz rule: .
- Another way to define : A linear operator satisfying (1) the Leibniz rule (2) the equation of total derivative for functions(0-forms).
- Closed and extra forms:
- : We start from for a 2-form . By induction we can verify holds for of every degrees of form.
- Definition: is closed <-> , is exact <-> .
- Poincare Lemma: If a closed is defined on a simply connected region, then it’s also exact.
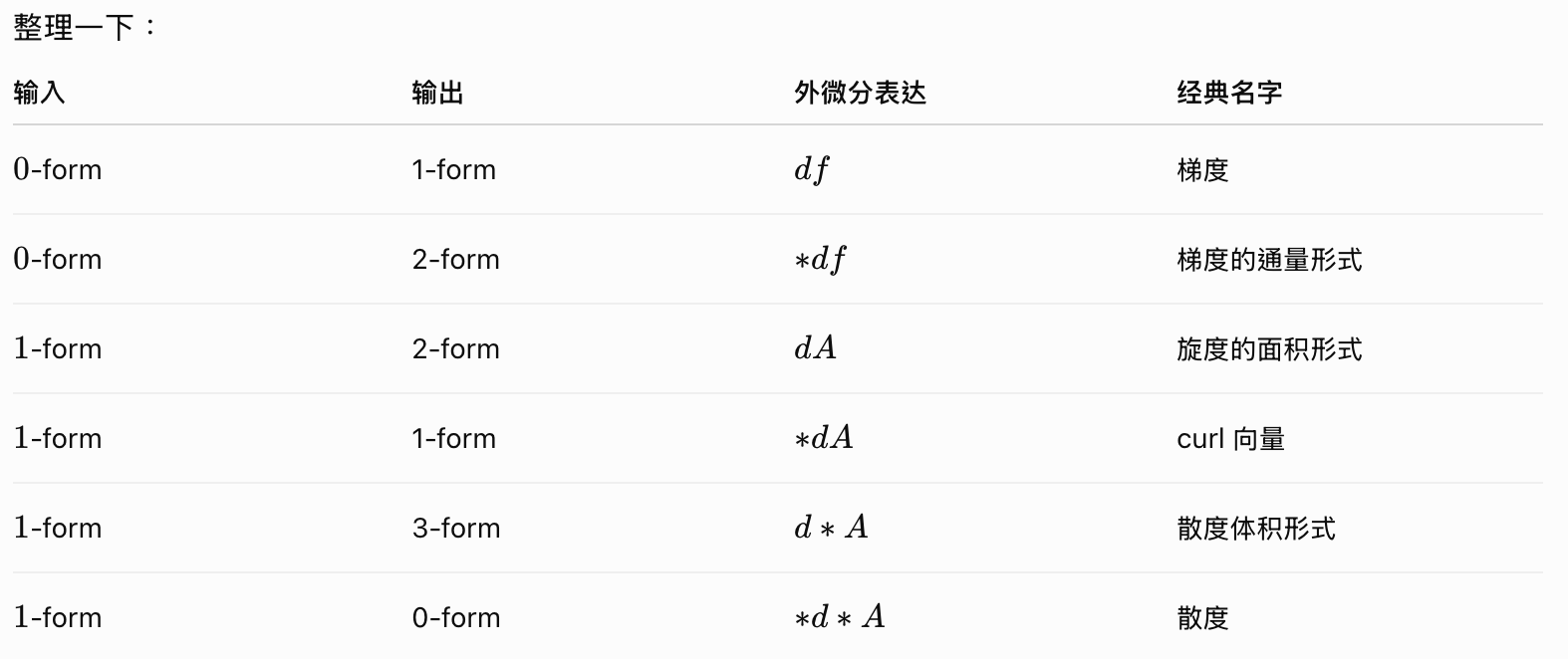
- Vector calculus via forms: . .
- Applying to we have .
- Calculation including and can be translated to the language of forms. (usually with the lemma that )
- Maxwell’s equations: ( denotes the spatial part of the spacetime , i.e. )
- Source-free equations: . Consider . Then is closed. Applying Poincare lemma we know locally there exists a 1-form potential s.t. .
- Source equations(in Gaussian units): . Similarly we have , where and .
Integration
- The line integral of a 1-form: .
- Path-independence <-> vanishing loop integrals.
- Exact form: Let . Substitute into the definition, we have .
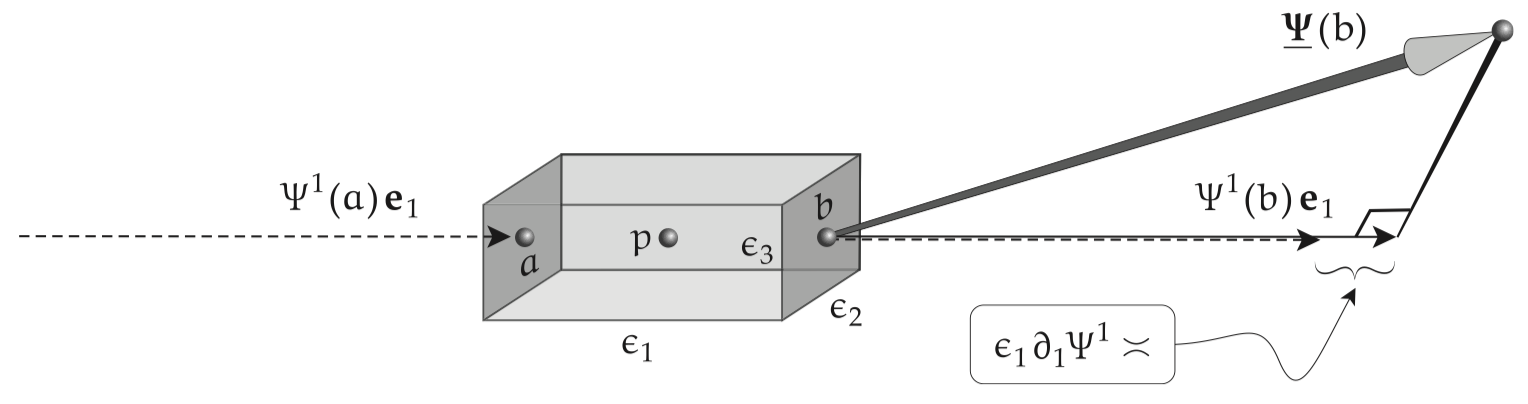
- The exterior derivative as an integral:
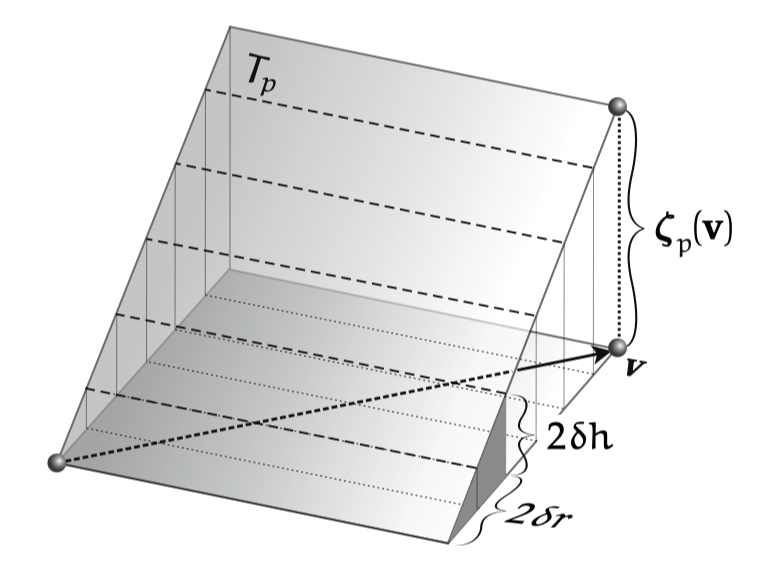
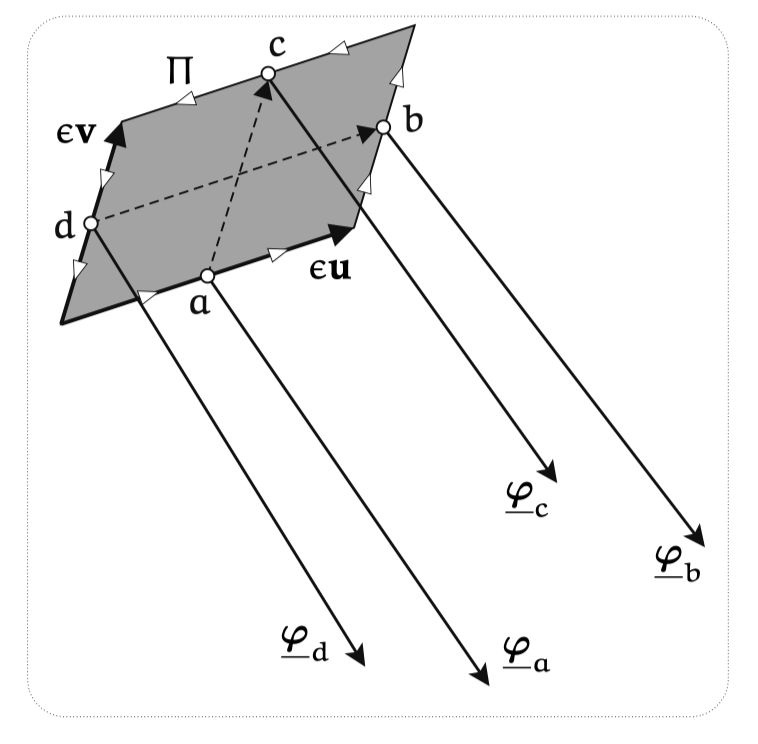
- : Circulation . We can evaluate using the midpoints: . Note here are vector fields and need not to be constant. The parallelogram is closed yields that . Taylor expand shows that . Necessarily the coefficient of vanishes, i.e or (Frobenius theorem ensures that this is also a sufficient condition). Thus , or the circulation ultimately equals to the flux.
- : Outward flux .
- : Circulation . We can evaluate using the midpoints: . Note here are vector fields and need not to be constant. The parallelogram is closed yields that . Taylor expand shows that . Necessarily the coefficient of vanishes, i.e or (Frobenius theorem ensures that this is also a sufficient condition). Thus , or the circulation ultimately equals to the flux.
- Fundamental theorem of exterior calculus(generalised Stokes’s theorem): .
- Area: , here is a rectangle stripped from parallel to -axis. Obviously then . Applying FTEC directly we have .
- : Applying FTEC twice yields for every , then . Conversely if we know .
- 0-form(Newton-Leibniz): .
- 1-form:
- Green’s theorem: . Then .
- Stokes’s theorem: .
- 2-form(Gauss’s/divergence theorem): .